SENSORNIC
We are Total Solution Company
- หน้าแรก
- เพื่อการศึกษา
- วิศวกรรมอิเล็กทรอนิกส์และไฟฟ้า
- Analog Electronics Basics Lab
- ห้องปฏิบัติการดิจิตอลอิเล็กทรอนิกส์
- Digital Logic Lab
- ห้องปฏิบัติการวิศวกรรมอิเล็กทรอนิกส์
- ห้องปฏิบัติการวิศวกรรมอิเล็กทรอนิกส์ (ส่วนประกอบ)
- ห้องปฏิบัติการตรวจจับและแก้ไขข้อบกพร่องที่ใช้ NI VirtualBench
- ห้องปฏิบัติการตรวจจับและแก้ไขข้อบกพร่องที่ใช้ NI ELVIS
- ห้องปฏิบัติการอิเล็กทรอนิกส์อุตสาหกรรม
- ห้องปฏิบัติการสอบเทียบเครื่องมือ
- อินเทอร์เฟซบ่งชี้และห้องปฏิบัติการควบคุม
- ห้องปฏิบัติการแอปพลิเคชันไมโครคอนโทรลเลอร์ วิศวกรรมอิเล็กทรอนิกส์และไฟฟ้า
- ห้องปฏิบัติการแอมพลิฟายเออร์แอมป์
- ห้องปฏิบัติการแอมพลิฟายเออร์ปฏิบัติการ
- ห้องปฏิบัติการอิเล็กทรอนิกส์กำลัง
- ห้องปฏิบัติการ ADC / DAC
- ห้องปฏิบัติการวงจรสามเฟส
- Arduino Applications Lab
- วิศวกรรมเครื่องกล
- การควบคุมและการวัดผล
- ห้องปฏิบัติการหลักการระบบควบคุม
- เครื่องมือวิเคราะห์ข้อมูลสำหรับนักวิจัย “DAnS”
- ห้องปฏิบัติการการวัดทางไฟฟ้าตาม NI VirtualBench
- ห้องปฏิบัติการลักษณะเฉพาะของส่วนประกอบอิเล็กทรอนิกส์บนพื้นฐาน
- Gyroscope Test and Calibration Lab
- เทรนเนอร์ควบคุมการวัดภาพ การควบคุมและการวัดผล
- Inverted Pendulum Lab
- แมชชีนวิชั่นแล็บ
- ห้องปฏิบัติการมาตรวิทยา
- ห้องปฏิบัติการแอปพลิเคชันไมโครคอนโทรลเลอร์ วิศวกรรมอิเล็กทรอนิกส์และไฟฟ้า
- ไมโครมอเตอร์และห้องปฏิบัติการควบคุมมอเตอร์อัตโนมัติ
- เทรนเนอร์การวัดตำแหน่ง
- เทรนเนอร์ควบคุมความดัน
- ห้องปฏิบัติการวิเคราะห์สัญญาณ GPS ที่ใช้ SDR
- ห้องปฏิบัติการเซนเซอร์
- Thermobox Lab
- เสียงและการสั่นสะเทือน
- หุ่นยนต์
- เมคคาทรอนิกส์
- ระบบการผลิตอัตโนมัติ เมคคาทรอนิกส์
- เทรนเนอร์ควบคุมการวัดภาพ เมคคาทรอนิกส์
- ห้องปฏิบัติการเซนเซอร์อุตสาหกรรม เมคคาทรอนิกส์
- Kinematics Lab เมคคาทรอนิกส์
- ห้องปฏิบัติการเมคคาทรอนิกส์
- ห้องปฏิบัติการอัตโนมัติของสายการผลิต เมคคาทรอนิกส์
- ห้องปฏิบัติการหุ่นยนต์ เมคคาทรอนิกส์
- แพลตฟอร์มสากลสำหรับหุ่นยนต์ เมคคาทรอนิกส์
- ชุดฝึกอบรมเมคคาทรอนิกส์
- เครื่องไฟฟ้า
- RF และการสื่อสาร
- นิวเมติกส์
- อากาศพลศาสตร์
- พลังงานและพลังงานทางเลือก
- การประยุกต์ใช้ในอุตสาหกรรม
- ซอฟต์แวร์การศึกษาโปรโตคอลอุตสาหกรรม“ InPEduS”
- ระบบการผลิตอัตโนมัติ การประยุกต์ใช้ในอุตสาหกรรม
- แท่นลำเลียงสำหรับการวิจัยการสื่อสารทางอุตสาหกรรม
- ซอฟต์แวร์การศึกษา Industrial and Avionic Protocols
- ห้องปฏิบัติการอิเล็กทรอนิกส์อุตสาหกรรม การประยุกต์ใช้ในอุตสาหกรรม
- ห้องปฏิบัติการ IoT อุตสาหกรรม เวอร์ชันพื้นฐาน
- ห้องปฏิบัติการโปรโตคอลอุตสาหกรรม
- ห้องปฏิบัติการเซนเซอร์อุตสาหกรรม การประยุกต์ใช้ในอุตสาหกรรม
- Local Area Network Lab
- ห้องปฏิบัติการอัตโนมัติของสายการผลิต การประยุกต์ใช้ในอุตสาหกรรม
- ซอฟต์แวร์การศึกษา Protocol Analyzer
- การเรียนรู้ของเครื่อง
- วิศวกรรมชีวการแพทย์
- วิศวกรรมอิเล็กทรอนิกส์และไฟฟ้า
- ฝึกอบรม
- อุปกรณ์
- ซอฟต์แวร์
- เพื่อการใช้งานจริง
- บทความ
- เกี่ยวกับเรา
- My Name
- หน้าแรก
- เพื่อการศึกษา
- วิศวกรรมอิเล็กทรอนิกส์และไฟฟ้า
- Analog Electronics Basics Lab
- ห้องปฏิบัติการดิจิตอลอิเล็กทรอนิกส์
- Digital Logic Lab
- ห้องปฏิบัติการวิศวกรรมอิเล็กทรอนิกส์
- ห้องปฏิบัติการวิศวกรรมอิเล็กทรอนิกส์ (ส่วนประกอบ)
- ห้องปฏิบัติการตรวจจับและแก้ไขข้อบกพร่องที่ใช้ NI VirtualBench
- ห้องปฏิบัติการตรวจจับและแก้ไขข้อบกพร่องที่ใช้ NI ELVIS
- ห้องปฏิบัติการอิเล็กทรอนิกส์อุตสาหกรรม
- ห้องปฏิบัติการสอบเทียบเครื่องมือ
- อินเทอร์เฟซบ่งชี้และห้องปฏิบัติการควบคุม
- ห้องปฏิบัติการแอปพลิเคชันไมโครคอนโทรลเลอร์ วิศวกรรมอิเล็กทรอนิกส์และไฟฟ้า
- ห้องปฏิบัติการแอมพลิฟายเออร์แอมป์
- ห้องปฏิบัติการแอมพลิฟายเออร์ปฏิบัติการ
- ห้องปฏิบัติการอิเล็กทรอนิกส์กำลัง
- ห้องปฏิบัติการ ADC / DAC
- ห้องปฏิบัติการวงจรสามเฟส
- Arduino Applications Lab
- วิศวกรรมเครื่องกล
- การควบคุมและการวัดผล
- ห้องปฏิบัติการหลักการระบบควบคุม
- เครื่องมือวิเคราะห์ข้อมูลสำหรับนักวิจัย “DAnS”
- ห้องปฏิบัติการการวัดทางไฟฟ้าตาม NI VirtualBench
- ห้องปฏิบัติการลักษณะเฉพาะของส่วนประกอบอิเล็กทรอนิกส์บนพื้นฐาน
- Gyroscope Test and Calibration Lab
- เทรนเนอร์ควบคุมการวัดภาพ การควบคุมและการวัดผล
- Inverted Pendulum Lab
- แมชชีนวิชั่นแล็บ
- ห้องปฏิบัติการมาตรวิทยา
- ห้องปฏิบัติการแอปพลิเคชันไมโครคอนโทรลเลอร์ วิศวกรรมอิเล็กทรอนิกส์และไฟฟ้า
- ไมโครมอเตอร์และห้องปฏิบัติการควบคุมมอเตอร์อัตโนมัติ
- เทรนเนอร์การวัดตำแหน่ง
- เทรนเนอร์ควบคุมความดัน
- ห้องปฏิบัติการวิเคราะห์สัญญาณ GPS ที่ใช้ SDR
- ห้องปฏิบัติการเซนเซอร์
- Thermobox Lab
- เสียงและการสั่นสะเทือน
- หุ่นยนต์
- เมคคาทรอนิกส์
- ระบบการผลิตอัตโนมัติ เมคคาทรอนิกส์
- เทรนเนอร์ควบคุมการวัดภาพ เมคคาทรอนิกส์
- ห้องปฏิบัติการเซนเซอร์อุตสาหกรรม เมคคาทรอนิกส์
- Kinematics Lab เมคคาทรอนิกส์
- ห้องปฏิบัติการเมคคาทรอนิกส์
- ห้องปฏิบัติการอัตโนมัติของสายการผลิต เมคคาทรอนิกส์
- ห้องปฏิบัติการหุ่นยนต์ เมคคาทรอนิกส์
- แพลตฟอร์มสากลสำหรับหุ่นยนต์ เมคคาทรอนิกส์
- ชุดฝึกอบรมเมคคาทรอนิกส์
- เครื่องไฟฟ้า
- RF และการสื่อสาร
- นิวเมติกส์
- อากาศพลศาสตร์
- พลังงานและพลังงานทางเลือก
- การประยุกต์ใช้ในอุตสาหกรรม
- ซอฟต์แวร์การศึกษาโปรโตคอลอุตสาหกรรม“ InPEduS”
- ระบบการผลิตอัตโนมัติ การประยุกต์ใช้ในอุตสาหกรรม
- แท่นลำเลียงสำหรับการวิจัยการสื่อสารทางอุตสาหกรรม
- ซอฟต์แวร์การศึกษา Industrial and Avionic Protocols
- ห้องปฏิบัติการอิเล็กทรอนิกส์อุตสาหกรรม การประยุกต์ใช้ในอุตสาหกรรม
- ห้องปฏิบัติการ IoT อุตสาหกรรม เวอร์ชันพื้นฐาน
- ห้องปฏิบัติการโปรโตคอลอุตสาหกรรม
- ห้องปฏิบัติการเซนเซอร์อุตสาหกรรม การประยุกต์ใช้ในอุตสาหกรรม
- Local Area Network Lab
- ห้องปฏิบัติการอัตโนมัติของสายการผลิต การประยุกต์ใช้ในอุตสาหกรรม
- ซอฟต์แวร์การศึกษา Protocol Analyzer
- การเรียนรู้ของเครื่อง
- วิศวกรรมชีวการแพทย์
- วิศวกรรมอิเล็กทรอนิกส์และไฟฟ้า
- ฝึกอบรม
- อุปกรณ์
- ซอฟต์แวร์
- เพื่อการใช้งานจริง
- บทความ
- เกี่ยวกับเรา
- My Name
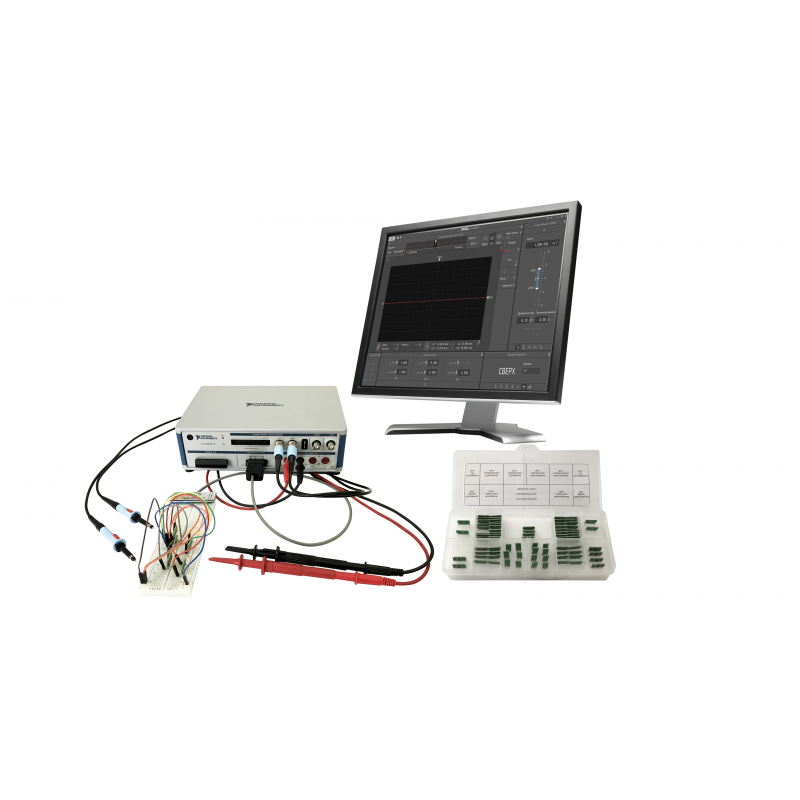
ห้องปฏิบัติการตรวจจับและแก้ไขข้อบกพร่องที่ใช้ NI VirtualBench
You are here:
- Home
- วิศวกรรมอิเล็กทรอนิกส์และไฟฟ้า
- ห้องปฏิบัติการตรวจจับและแก้ไขข้อบกพร่องที่ใช้ NI VirtualBench